
Zoetrope mit Pinoo
Zweck des Projekts: Erstellen eines Zoetrope-Systems mit einem Tastenmodul und einem Gleichstrommotor mithilfe der Pinoo-Steuerkarte.
HINWEIS: Zoetrope ist ein System, das Standbilder so aussehen lässt, als würden sie sich bewegen.
Dauer: 2 Lektionen
Altersgruppe: 7 Jahre und älter
Pinoo-Set: Vollständiger Satz
Gewinne:
- Pinoo lernt, die Steuerplatine zu codieren
- Erlernt das Codieren des Tastenmoduls.
- Lernt, Gleichstrommotoren zu codieren.
- Die Fähigkeit, Algorithmen zu etablieren, verbessert sich.
- Die Programmierfähigkeiten verbessern sich.
Erforderliche Materialien: Mblock 3-Programm, Pinoo-Steuerkarte, Tastenmodul, Gleichstrommotor, Verbindungskabel

Für das Design benötigte Materialien: Forex, Pappe, A4-Papier, Buntstifte, Schere, Silikonpistole, Klebeband, Karton, Zungenstift

Projektaufbau:
- Wir zeichnen einen Kreis mit einem Radius von 7 cm und schneiden ihn aus.

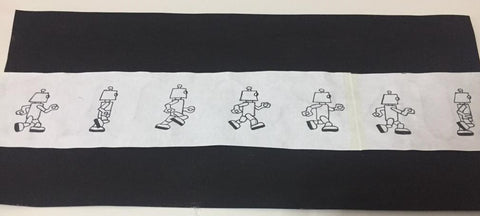
- Aus A4-Papier schneiden wir einen Streifen von 41 x 7,5 cm aus. Ein Blatt Papier reicht für seine Länge nicht aus. Deshalb kombinieren wir zwei Papiere mit Klebeband. Wir zeichnen in bestimmten Abständen Formen auf den Streifen.
*** Die Formen müssen dem aufeinanderfolgenden Zoetrop entsprechen.

- Wir schneiden aus schwarzem Karton ein 41 x 18 cm breites Rechteck aus.

- Wir fügen unseren Streifen genau in der Mitte des schwarzen Rechtecks ein.
- Wir werden auf dem Karton rechteckige Räume erstellen, die bis zum oberen Rand unserer Formen reichen. Wichtig ist, dass die rechteckigen Räume, die wir ausschneiden, der Mitte der beiden Formen entsprechen.

- Diesmal werden wir dasselbe für den Unterabschnitt tun. Aber dieses Mal machen wir Schnitte zwischen den Formen und falten die resultierenden Stücke nach außen.

- Mit unserem Streifen nach innen befestigen wir die beiden Enden zu einem rechteckigen Zylinder.

- Den von uns erstellten Zylinder befestigen wir mit Hilfe der ausgeklappten Teile mit einer Silikonpistole am Kreis. Anschließend können Sie die überschüssigen Teile abschneiden.

- Wir bohren ein Loch in den mittleren Teil der Zungenstange.

- Wir schneiden aus Forex ein Rechteck in der Größe eines Zungenstäbchens und zwei kleinere rechteckige Stücke in der Größe seiner kurzen Seite. Wir kleben diese kleinen Stücke an die kurzen Kanten.

- Wir passen die Sprachleiste an das von uns erstellte Design an.

- Wir befestigen den Forex-Teil des Designs in der Mitte des von uns erstellten Kreisdesigns.

- Wir reparieren es, indem wir den Stangenteil des Motors in das Loch einführen, das wir auf der Zungenstange geschaffen haben. (Wenn sich die Stange im Loch zu drehen beginnt, darf sie nicht mit Gewalt betätigt werden. Wenn das Loch zu diesem Zeitpunkt noch klein ist, vergrößern Sie es unbedingt.)

- Zuerst öffnen wir ein Fenster von 3 x 1,5 cm auf der Box und dann ein weiteres Fenster in der gleichen Größe unten.


- Wir befestigen den Gleichstrommotor im oberen Fenster, indem wir sein Kabel in der Box unterbringen, und wir befestigen den Knopf im unteren Fenster, indem wir das Kabel in der Box unterbringen.

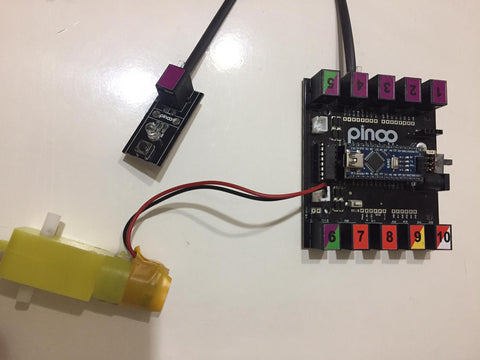
- Lasst uns unsere Kontakte knüpfen. Wir legen die Pinoo-Steuerkarte in die Box. Wir verbinden das Motorkabel mit dem A1/A2-Eingang (rechts) von den entsprechenden Eingängen für den Motor und das Tastenmodul mit dem violetten Eingang Nummer 4 mit dem Verbindungskabel Kasten.

- Sie können das Design nach Ihren Wünschen verschönern.

- Wir haben unsere Verbindungen und das Design fertiggestellt. Fahren wir nun mit dem Codierungsteil fort. Wir werden hierfür die mblock-3-Anwendung verwenden.
- Verbinden wir unsere Pinoo-Steuerkarte über das Verbindungskabel mit dem Computer und melden uns bei der Mblock3-Anwendung an. Als nächstes stellen wir unsere Pinoo-Steuerkarte dem Computer vor. Dazu klicken wir zunächst auf der Registerkarte „Verbinden“ auf die Option „Serieller Anschluss“. Anschließend wählen wir „COM3“ aus. (Die Anzahl kann je nach Computer und Anschluss variieren.)

- Nachdem wir die Verbindung zur seriellen Schnittstelle hergestellt haben, wählen wir auf der Registerkarte „Karten“ die Karte aus, die wir verwenden möchten. Wir arbeiten mit dem Nano-Modell von Arduino.

- Um die Pinoo-Erweiterung zu unserem Computer hinzuzufügen, klicken wir auf der Registerkarte „Erweiterungen“ auf die Option „Erweiterungen verwalten“. Im sich öffnenden Fenster geben wir „Pinoo“ in die Suchmaschine ein und klicken im Ergebnis einfach auf „Herunterladen“. unser Computer.

- Wir gehen erneut zur Registerkarte „Erweiterungen“ und klicken auf Pinoo. Wir werden unsere Codes mit der Pinoo-Erweiterung schreiben.

- Im Codierungsteil; Wir erhalten den Code, wenn wir im Menü „Ereignisse“ auf die grüne Flagge klicken, damit die Anwendung startet.

- Da wir möchten, dass alle Codeblöcke, die wir schreiben, kontinuierlich ausgeführt werden, nehmen wir zunächst den Codeblock mit kontinuierlicher Wiederholung aus der Registerkarte „Steuerung“.

- Wir erhalten Hilfe von der Puppe, um den Wert des Schaltflächenmoduls zu erlernen. Dazu erhalten wir den Befehl „Sag Hallo“ aus der Registerkarte „Ansicht“. Anstelle der Hallo-Anweisung erhalten wir den Codeblock, der sich auf das Schaltflächenmodul auf der Registerkarte „Robots“ bezieht. Wir ändern den Pin-Eingang auf Pinoo4, mit dem wir uns verbinden.

- Klicken wir auf die grüne Flagge und beobachten wir die Werte, die sie durch Drücken der Taste am Sensor erhält.

- Wenn der Wert der Taste 1 ist, d. h. wenn die Taste gedrückt wird, beginnt der Motor für 15 Sekunden zu arbeiten, andernfalls (wenn der Wert 0 ist) stoppt der Motor. Lassen Sie uns nun das, was wir geschrieben haben, in Code umwandeln.
- Um die Bedingungsschleife (IF) zu erstellen, holen wir uns die if not-Anweisung von der Registerkarte „Steuerung“.

- Um den Bedingungsabschnitt zu erstellen, nehmen wir den gleichen Ausdruck aus der Registerkarte „Operationen“. Im ersten Feld platzieren wir den Codeblock, der sich auf das Schaltflächenmodul aus der Registerkarte „Robots“ bezieht. Wir ändern die Pin-Nummer in „pinoo4“. Kasten.

- Wenn der Tastenwert gleich 1 ist, muss sich der Motor, also das Zoetrop, drehen. Dazu erhalten wir den Befehl „Pinoo Bot Wheel: Right Direction Forward Speed 0“ aus der Registerkarte „Roboter“. Wir ändern den Geschwindigkeitsbereich auf 70.

- Wir möchten, dass sich der Motor/Zoetrop 15 Sekunden lang dreht, nachdem die Taste gedrückt wurde. Auf der Registerkarte „Steuerung“ nehmen wir den Befehl „1 Sekunde warten“ und ändern 15 in 1.

- Wenn der Tastenwert nicht 1 ist, das heißt, wenn die Taste nicht gedrückt wird, muss der Motor/Zoetrop stationär sein. Wenn nicht, erhalten wir den Befehl „Pinoo Bot Wheel: Right Direction Forward Speed 0“ von der Registerkarte „Roboter“. Abschnitt.

- Nachdem wir unsere Codes ausgefüllt haben, überprüfen wir den Betrieb unseres Projekts, indem wir auf die grüne Flagge klicken. Wenn wir den Knopf drücken, sollte sich das Zoetrop 15 Sekunden lang drehen. Wenn die Taste nicht gedrückt wird, sollte das Zoetrop stoppen.
- Wenn beim Betrieb unseres Projekts kein Problem auftritt, müssen wir die Codes, die wir auf unsere Karte geschrieben haben, hochladen, um unser Projekt mit einer vom Computer unabhängigen Stromquelle ausführen zu können.
Dazu werfen wir den Klick auf den grünen Flaggencode, den wir zu Beginn verwendet haben, und den Code, mit dem wir die Puppe den Tastenwert sagen ließen, weg und holen uns den Pinoo-Programmcode aus dem Menü „Roboter“.

- Wir klicken mit der rechten Maustaste auf den Code und klicken auf „Auf Arduino hochladen“. (Wir arbeiten mit Arduino als Karte.)

- Wir warten darauf, dass die Codes auf die Karte hochgeladen werden. Nachdem die Installation abgeschlossen ist, schließen wir das Fenster.

- Wenn es kein Problem gibt, ziehen wir unser Netzkabel vom Computer ab. Wir versorgen unsere Pinoo-Steuerkarte mit Hilfe einer 9-V-Batterie und eines Batteriedeckels. Außerdem stellen wir den Ein-/Ausschalter, der sich direkt neben dem Batterieeingang befindet, auf die Ein-Position.
