
Fächer mit Pinoo
Zweck des Projekts: Erstellen eines Lüftersystems mit Abstandssensor und Gleichstrommotor mithilfe der Pinoo-Steuerkarte.
Dauer: 2 Lektionen
Altersgruppe: 7 Jahre und älter
Pinoo Set:Autobausatz oder komplettes Set.
Gewinne:
- Pinoo lernt, die Steuerplatine zu codieren
- Lernt, den Abstandssensor zu codieren.
- Lernt, Gleichstrommotoren zu codieren.
- Die Fähigkeit, Algorithmen zu etablieren, verbessert sich.
- Die Programmierfähigkeiten verbessern sich.
Benötigte Materialien: Mblock 3-Programm, Pinoo-Steuerkarte, Abstandssensor, Gleichstrommotor, Verbindungskabel.

Benötigte Materialien für die Gestaltung: 2 Toilettenpapierrollen, Pappe, farbiger Karton, Schere, Silikonpistole, Farbe.

Projektaufbau:

Wir zeichnen drei Fächerformen auf den Karton und schneiden sie aus.
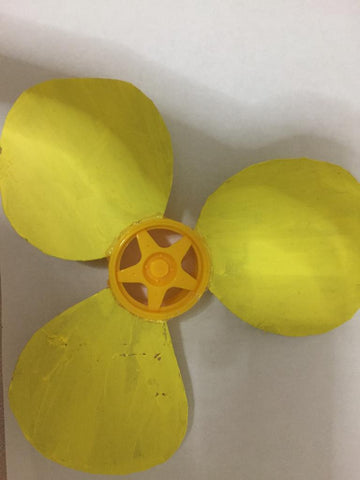
Wir lackieren die Propellerteile und kleben sie in regelmäßigen Abständen auf die Motorriemenscheibe.

Wir lackieren die Toilettenpapierrollen und befestigen den Motor an einer der Rollen.
Wir machen an einer beliebigen Stelle in der Rolle ein Loch, aus dem wir das Motorkabel entfernen können.

Wir kleben die Rolle, auf der wir den Motor befestigt haben, horizontal auf die zweite Rolle, die wir als Griff verwenden.

Wir befestigen die Riemenscheibe am Motor.

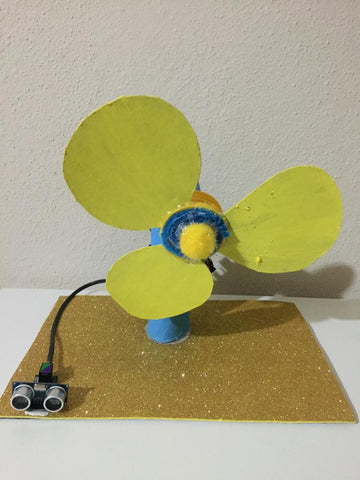
Wir befestigen die erhaltene Form in der Mitte des Kartons, den wir als Boden verwenden werden, und den Abstandssensor auf der linken Seite des Bodens.

Lasst uns unsere Kontakte knüpfen. Wir befestigen unsere Pinoo-Karte am Griff unseres Ventilators. Wir verbinden das Motorkabel mit dem B1/B2-Eingang (links), einem der passenden Eingänge für den Motor, und unseren Abstandssensor mit dem Verbindungskabel mit dem lila/grünen Eingang Nummer 5.
Verbindung:

Für den Codierungsteil verwenden wir die Anwendung mblock-3.

Verbinden wir unsere Pinoo-Steuerkarte über das Verbindungskabel mit dem Computer und melden uns bei der Mblock3-Anwendung an. Als nächstes stellen wir unsere Pinoo-Steuerkarte dem Computer vor. Klicken Sie dazu zunächst auf der Registerkarte „Verbinden“ auf die Option „Serieller Anschluss“. Dann wählen wir COM3. (Die Anzahl kann je nach Computer und Port variieren.)

Nachdem wir die Verbindung zur seriellen Schnittstelle hergestellt haben, wählen wir auf der Registerkarte „Karten“ die Karte aus, die wir verwenden möchten. Wir arbeiten mit dem Nano-Modell von Arduino.

Um die Pinoo-Erweiterung zu unserem Computer hinzuzufügen, klicken wir auf der Registerkarte „Erweiterungen“ auf die Option „Erweiterungen verwalten“. Im sich öffnenden Fenster geben wir „Pinoo“ in die Suchmaschine ein und klicken beim Ergebnis einfach auf „Herunterladen“. Es wurde auf unserem Computer installiert.

Wir klicken erneut auf Pinoo auf der Registerkarte „Erweiterungen“. Wir werden unsere Codes mit der Pinoo-Erweiterung schreiben.
Codierung:

Im Codierungsteil erhalten wir den Code, wenn wir im Menü „Ereignisse“ auf die grüne Flagge klicken, um die Anwendung zu starten.

Mithilfe des Dummys lernen wir den vom Abstandssensor erfassten Wert. Dazu erhalten wir den Befehl „Sag Hallo“ aus der Registerkarte „Ansicht“. Anstelle der Hello-Anweisung erhalten wir den Codeblock für den Abstandssensor im Roboter-Tab. Wir ändern die Pin-Eingabe in Pinoo5, mit dem wir eine Verbindung hergestellt haben.
Da wir möchten, dass es kontinuierlich und nicht einmal gelesen wird, fügen wir alle unsere Codes auf der Registerkarte „Steuerung“ in den Block „Kontinuierliche Wiederholung“ ein.

Klicken wir auf die grüne Flagge und beobachten wir die Änderung der Werte, indem wir unsere Hand näher an den Lüfter heranführen und den vom Sensor angezeigten Wert notieren dass es einen Wert von etwa 20 anzeigt.

Wenn der vom Abstandssensor gemessene Wert kleiner als 20 ist, d Code.
Hier verwenden wir den if-Block auf der Registerkarte „Steuerung“ und die kleinen und großen Vergleichsoperatoren auf der Registerkarte „Operationen“.

Vervollständigen wir nun die Codes zum Starten und Stoppen des Lüftermotors entsprechend der zu erfüllenden Bedingung. Auf der Registerkarte „Roboter“ erhalten wir den Codeblock „PinooBot Wheel:Right Direction:Forward Speed:0“. In beiden Fällen ändern wir das Rad auf „Links“ und für eine Distanz von weniger als 20 ändern wir die Geschwindigkeit auf 255.
Da wir möchten, dass dieser Prozess ständig kontrolliert wird, platzieren wir alle Blöcke im kontinuierlich wiederholenden Block.

Nachdem wir uns dem Lüfter genähert haben, möchten wir, dass er eine Weile läuft und dann anhält. Dazu verwenden wir den Befehl „Warten Sie 1 Sekunde“ aus der Registerkarte „Steuerung“ und den Codeblock „PinooBot Wheel: Right Direction: Forward Speed: 0“ aus der Registerkarte „Robots“. . Wir ändern den Ausdruck 1 Sek. in 3 Sek.
Nachdem wir unsere Codes ausgefüllt haben, überprüfen wir den Betrieb unseres Projekts, indem wir auf die grüne Flagge klicken. Wenn wir uns dem Ventilator nähern, dreht sich sein Propeller 3 Sekunden lang. Wenn wir uns vom Ventilator entfernen, stoppt der Ventilatorflügel.

Wenn beim Betrieb unseres Projekts kein Problem auftritt, müssen wir die Codes, die wir auf unsere Karte geschrieben haben, hochladen, um unser Projekt mit einer vom Computer unabhängigen Stromquelle ausführen zu können.
Dazu verwerfen wir den Klick auf den grünen Flaggencode, den wir zu Beginn verwendet haben, und den Code, mit dem wir die Puppe dazu gebracht haben, den Sensorwert mitzuteilen, und holen uns den Pinoo-Programmcode aus dem Menü „Roboter“.
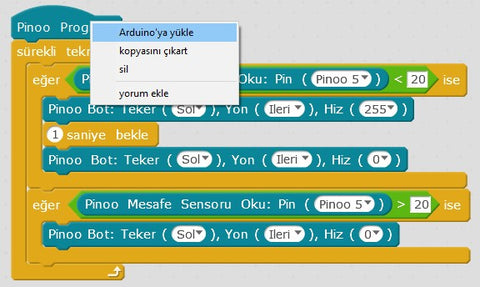
Wir klicken mit der rechten Maustaste auf den Code und klicken auf „Auf Arduino hochladen“. (Wir arbeiten mit Arduino als Karte.)

Wir warten darauf, dass die Codes auf die Karte hochgeladen werden. Nachdem die Installation abgeschlossen ist, schließen wir das Fenster.

Wenn es kein Problem gibt, trennen wir unser Stromkabel vom Computer. Wir versorgen unsere Pinoo-Steuerkarte mit Hilfe einer 9-V-Batterie und eines Batteriedeckels. Außerdem stellen wir den Ein-/Ausschalter, der sich direkt neben dem Batterieeingang befindet, auf die Ein-Position.
ARDUINO-IDE-CODES:
// Wir haben die Motortreiber-Pins den Pins 5 und 6 zugewiesen int motora1 = 5 ; int motora2 = 6 ; // Wir haben den Pins 9 und 8 Trigger- und Echo-Pins zugewiesen int echoPin = 8 ; int trigPin = 9 ; lange Dauer , Distanz ; //Variable für Dauer- und Distanzmessung zugewiesen void setup ( ) { // ist der Ausgangspin des Motors. pinMode ( motora1 , OUTPUT ) ; pinMode ( motora2 , OUTPUT ) ; // Wir setzen die Eingangs- und Ausgangspins der Trigger- und Echo-Pins pinMode ( echoPin , INPUT ) ; pinMode ( trigPin , OUTPUT ) ; } Leere Schleife ( ) { //wir haben den Abstandssensor aktiviert digitalWrite ( trigPin , LOW ) ; VerzögerungMikrosekunden ( 5 ) ; digitalWrite ( trigPin , HIGH ) ; VerzögerungMikrosekunden ( 10 ) ; digitalWrite ( trigPin , LOW ) ; Dauer = PulseIn ( echoPin , HIGH ) ; Abstand = Sure / 29,1 / 2 ; //die Entfernung gemessen if ( distance < 20 ) { // wenn der Abstand kleiner als 20 ist nach vorne ( ) ; Verzögerung ( 3000 ) ; stoppen ( ) ; } else { // andernfalls die Motoren stoppen lassen stoppen ( ) ; } } void forward ( ) { // Vorwärtsfunktion digitalWrite ( motora1 , HIGH ) ; digitalWrite ( motora2 , LOW ) ; } void stop ( ) { // Funktion stoppen digitalWrite ( motora1 , LOW ) ; digitalWrite ( motora2 , LOW ) ; }