
Labyrinthspiel mit Pinoo
Zweck des Projekts: Erstellen eines Labyrinthspiels mit dem Servomotormodul und dem Joystickmodul unter Verwendung der Pinoo-Steuerkarte.
Dauer: 2 Lektionen
Altersgruppe: 7 Jahre und älter
Pinoo-Set: Komplettes Set, Maker-Set.
Gewinne:
- Pinoo lernt, die Steuerplatine zu codieren
- Erlernt das Codieren des Joystick-Moduls.
- Erlernt das Codieren des Servomotormoduls.
- Die Fähigkeit, Algorithmen zu etablieren, verbessert sich.
- Die Programmierfähigkeiten verbessern sich.
- Er entwirft und spielt sein eigenes Spiel.
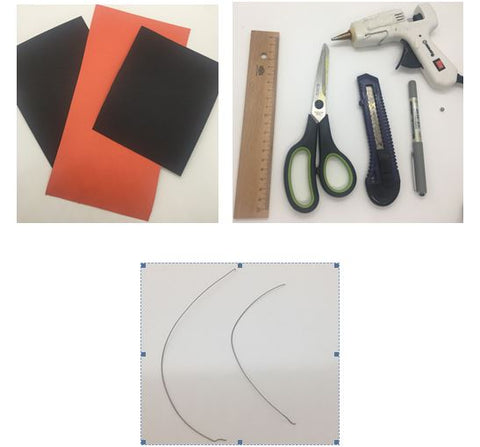
Benötigte Materialien: Mblock 3-Programm, Pinoo-Steuerkarte, Joystick-Modul, 2 Servomotormodule, Verbindungskabel

Für die Gestaltung benötigte Materialien: Farbiger Karton, Lineal, Bleistift, Cutter, Schere, Silikonpistole und Silikon, Kugellager, Aluminiumdraht.
Projektaufbau:
- Für die Basis des Labyrinths schneiden wir mit Hilfe einer Schere ein 20 cm großes Quadrat aus Pappe aus.

- Für die Ränder des Labyrinths schneiden wir 2 gleichschenklige Trapeze von 14 cm x 16 cm.

- Wir bohren in die Mitte eines der gleichschenkligen Trapeze ein rechteckiges Loch, das groß genug ist, um den Servomotor aufzunehmen.
HINWEIS: Dieser Servomotor bewegt sich in der X-Achse, also in die rechte und linke Richtung.

- In das andere Teil bohren wir ein kleines Loch, das der Mitte des Rechtecks entspricht, das wir für den Servomotor ausgeschnitten haben.

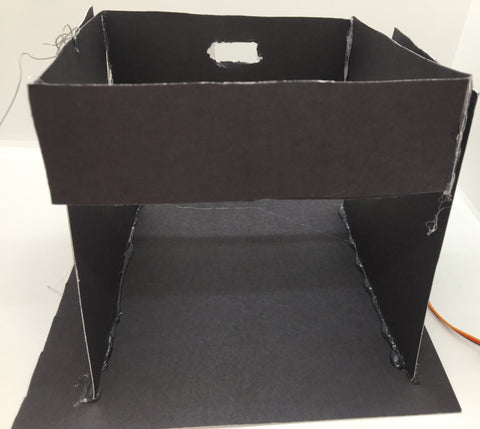
- Wir schneiden 4 Rechtecke von 14 cm x 4 cm für die Stütze im Inneren des Labyrinths.

- Wir formen ein Quadrat, indem wir die Rechtecke mit Hilfe einer Silikonpistole aneinander kleben.

- Mit einem Fräser öffnen wir ein rechteckiges Loch, das groß genug ist, um den Servomotor in den mittleren Teil einer Seite des von uns erstellten Quadrats zu passen.
HINWEIS: Dieser Servomotor bewegt sich in der Y-Achse, also nach oben und unten.

- Wir montieren den Propeller des Servomotors mit Hilfe einer Silikonpistole horizontal in der Mitte des äußeren Teils der Kante links vom Loch.

- Wir bohren ein kleines Loch in den mittleren Teil der Kante rechts neben dem rechteckigen Loch.

- Wir verbinden das Loch, das wir in das Trapezstück gebohrt haben, und das Loch, das wir in das Quadrat gebohrt haben, mit Aluminiumdraht, aber nicht zu fest.

- Wir montieren unseren Motor mit Hilfe einer Silikonpistole in das Loch, das wir in das gleichschenklige Stück für den Servomotor gebohrt haben.

- Wir kombinieren den Servomotor mit dem Propeller, den wir auf das Quadrat geklebt haben.
HINWEIS: Wir werden den Propeller und den Motor im Codierungsteil trennen. Kleben Sie daher beides nicht zusammen! 
- Mit Hilfe einer Silikonpistole befestigen wir die zusammengefügten Kanten am Labyrinthboden.
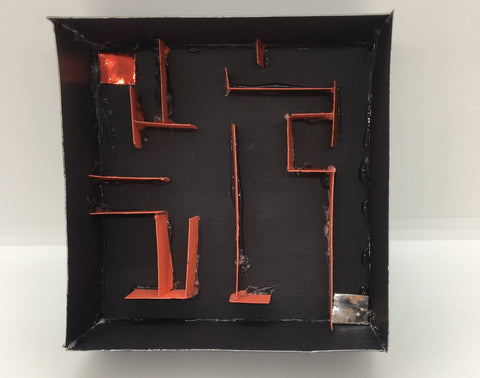
- Für das Labyrinth schneiden wir ein 12 cm x 12 cm großes Quadrat aus Pappe.

- Für die Wände des Labyrinths schneiden wir 4 Rechtecke von 12 x 4 cm aus. Dann befestigen wir es mit Hilfe einer Silikonpistole an den Kanten des Quadrats.

- Um unser Labyrinth zu gestalten, schneiden wir 1,5 cm breite Stücke aus verschiedenfarbigem Karton.
HINWEIS: Wie viel Sie abschneiden, hängt von dem Labyrinth ab, das Sie erstellen möchten.
- Wir gestalten unser Labyrinth so, wie wir es wollen. Wir kleben Pappe auf diese Teile, um die Start- und Endpunkte anzuzeigen.
- Wir montieren den Motor in dem rechteckigen Loch, das wir für den Y-Achsen-Servomotor geöffnet haben.

- Wir bohren ein kleines Loch in die Mitte der Kante gegenüber dem Servomotor.

- Wir bohren ein kleines Loch in die Mitte einer Seite des von uns erstellten Labyrinths.

- Wir montieren den Propeller mit einer Silikonpistole am mittleren Teil der Kante gegenüber dem von uns geöffneten Loch, das dem Servomotor entspricht.

- Wir verbinden das Loch, das wir im Labyrinth gebohrt haben, und das Loch, das wir im Stützteil gebohrt haben, mit Hilfe von Aluminiumdraht, aber nicht zu fest.

- Wir kombinieren den Servomotor und seinen Propeller.
HINWEIS: Wir werden den Propeller und den Motor im Codierungsteil trennen. Kleben Sie daher beides nicht zusammen!

- Wir schneiden ein Trapez von 11 x 8 cm aus, um es unter das Joystick-Modul zu legen.

- Wir kleben es mit Hilfe einer Silikonpistole auf die Vorderseite des Spiels.
- Wir montieren das Joystick-Modul mit Hilfe einer Silikonpistole auf unserem Trapezstück.

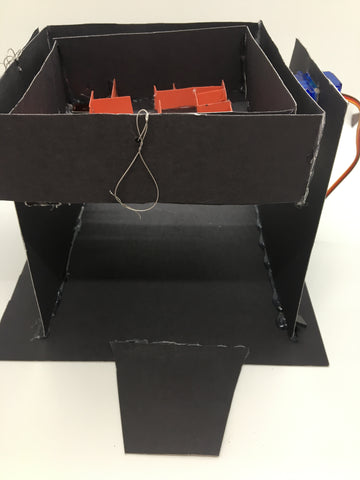
- Wir verbinden die Servomotoren mit den Servomotormodulen, wobei das braune Kabel GND, das rote Kabel 5 V und das orangefarbene Kabel D0 entspricht.

- Wir knüpfen unsere Verbindungen. Wir verbinden das Joystick-Modul mit dem Verbindungskabel mit dem rot/gelben Eingang Nummer 9. Wir verbinden den Servomotor auf der X-Achse mit Hilfe des Verbindungskabels mit dem violetten Eingang Nummer 3. Wir verbinden den Servomotor auf der Y-Achse über das Verbindungskabel mit dem violetten Eingang Nummer 2.
HINWEIS: Lassen Sie uns den Servomotor und die Propeller trennen. 
- Wir haben unsere Verbindungen fertiggestellt und fahren nun mit dem Codierungsteil fort. Wir werden hierfür die mblock-3-Anwendung verwenden.
- Wir verbinden unsere Pinoo Control Card über das Verbindungskabel mit dem Computer und melden uns bei der Mblock3-Anwendung an. Dann führen wir unsere Pinoo-Steuerkarte in den Computer ein. Klicken Sie dazu zunächst auf der Registerkarte „Verbinden“ auf die Option „Serieller Anschluss“. Dann wählen wir COM4 aus. (Die Anzahl kann je nach Computer und Port variieren.)

- Nachdem wir die Verbindung zur seriellen Schnittstelle hergestellt haben, wählen wir auf der Registerkarte „Karten “ die Karte aus, die wir verwenden möchten. Wir arbeiten mit dem Nano-Modell von Arduino.

- Um die Pinoo-Erweiterung zu unserem Computer hinzuzufügen, klicken wir auf der Registerkarte „Erweiterungen“ auf die Option „Erweiterungen verwalten “. Im sich öffnenden Fenster geben wir „ Pinoo “ in die Suchmaschine ein und klicken beim Ergebnis einfach auf „Herunterladen“. Es wurde auf unserem Computer installiert.


- Wir gehen erneut zur Registerkarte „Erweiterungen“ und klicken auf „Pinoo“ . Wir werden unsere Codes mit der Pinoo-Erweiterung schreiben.

Wir klicken auf die Registerkarte „Verbinden“. Im sich öffnenden Fenster klicken wir auf „Firmware-Update“.

- Im Codierungsteil; Wir erhalten den Code, wenn wir im Menü „Ereignisse“ auf die grüne Flagge klicken, damit die Anwendung startet.

- Das Joystick-Modul verfügt über zwei Achsen, die X- und die Y-Achse. Um ihre Werte zu sehen, müssen wir eine Variable definieren. Dazu klicken wir im Menü „Data&Block“ auf den Befehl „Variable erstellen“.

- Auf dem angezeigten Bildschirm definieren wir separate Variablen namens X-Achse und Y-Achse.


- Den Befehl „Kontinuierlich wiederholen“ erhalten wir aus dem Steuerungsmenü. Dann nehmen wir die Codes für die x-Achse mit 0 und die y-Achse mit 0 aus dem Abschnitt „Data&Block“ und fügen sie in den kontinuierlich wiederholenden Block ein.

- Wir nehmen das Divisionszeichen aus dem Operationsmenü und platzieren es über der Zahl 0. Unser Ziel dabei ist, den Wert des Joystick-Moduls in den Wert des Servomotors umzuwandeln.

- Wir erhalten den Joystick-Code aus dem Menü „Roboter“ und stellen die x- und y-Achsen ein.

- Dann schreiben wir 5,683 auf die rechte Seite der Divisionsoperation. Der Grund dafür ist; Das Joystick-Modul nimmt Werte zwischen 0 und 1023 an und das Servomotormodul nimmt Werte zwischen 0 und 180 an. Wenn der Wert des Joystick-Moduls seinen höchsten Wert hat, also 1023, sollte auch das Servomotor-Modul seinen höchsten Wert haben. Um die eingehenden Werte auszugleichen, müssen wir 1023/180 dividieren und das Ergebnis ist 5,683.

- Jetzt klicken wir auf die grüne Flagge und berühren das Joystick-Modul überhaupt nicht. Die Servomotormodule bewegen sich entsprechend der Position des Joystickmoduls in der Mitte. Dann klicken wir auf den roten Knopf und stoppen ihn. Dann bauen wir die Servomotormodule und Propeller wieder zusammen.
- Wir erhalten die Servomotorcodes von der Registerkarte „Roboter“ und vergessen nicht, die Stiftteile zu ändern. Dann passen wir ihren Winkel relativ zu den Achsen des Joystick-Moduls an. Wir haben die x-Achse an die 3. Tür angehängt, also setzen wir sie im Daten- und Blockmenü auf die x-Achse und setzen die 2. Tür auf die y-Achse. Wo auch immer wir nun das Joystick-Modul ziehen, bewegt sich unser Servomotormodul entsprechend.

- Wenn beim Betrieb unseres Projekts kein Problem auftritt, müssen wir die Codes, die wir auf unsere Karte geschrieben haben, hochladen, um unser Projekt mit einer vom Computer unabhängigen Stromquelle ausführen zu können.
Dazu verwerfen wir den Klick auf den grünen Flaggencode, den wir zu Beginn verwendet haben, und den Code, mit dem wir die Puppe dazu gebracht haben, den Sensorwert mitzuteilen, und holen uns den Pinoo-Programmcode aus dem Menü „Roboter“.

- Wir klicken mit der rechten Maustaste auf den Code und klicken auf Auf Arduino hochladen. (Wir arbeiten mit Arduino als Board.)

- Im sich öffnenden Fenster klicken wir erneut auf die Schaltfläche „Auf Arduino hochladen“.

- Wir warten, während unsere Codes auf die Karte hochgeladen werden. Nachdem die Installation abgeschlossen ist, klicken wir auf die Schaltfläche „Schließen“.

- Wenn es kein Problem gibt, ziehen wir unser Netzkabel vom Computer ab. Wir versorgen unsere Pinoo-Steuerkarte mit Hilfe einer 9-V-Batterie und eines Batteriedeckels. Außerdem stellen wir den Ein-/Ausschalter, der sich direkt neben dem Batterieeingang befindet, auf die Ein-Position.
- Arbeitsstatus des Projekts:
Wenn wir das Joystick-Modul nicht bewegen, bleibt das Labyrinthspiel flach.

Wenn wir das Joystick-Modul bewegen, bewegt sich das Labyrinth in diese Richtung.
