
Winkender Roboter mit Pinoo
Zweck des Projekts: Erstellen eines Winkeroboterprojekts mit der Pinoo-Steuerkarte und Servomotor-, LED- und Tastenmodulen.
Dauer: 2 Lektionen
Pinoo-Set: Erfindungsset, Komplettset, Maker-Set.
Altersgruppe: 7 Jahre und älter
Gewinne:
- Pinoo lernt, die Steuerkarte zu codieren.
- Erlernt den Umgang mit LED-Modulen.
- Erlernt den Umgang mit dem Tastenmodul.
- Erlernt den Umgang mit Servomotoren.
- Die Fähigkeit, Algorithmen zu etablieren, verbessert sich.
- Die Programmierfähigkeiten verbessern sich.
Zu verwendende Materialien: Mblock 3-Programm, Pinoo-Steuerkarte, Tastenmodul, 2 LED-Module, Servomotor

Für das Design benötigte Materialien: 2 mittelgroße Schachteln, Schere und ein Allzweckmesser, farbige Pappe, 9 Pappbecher, Silikonpistole und Silikon.

Projektaufbau:
- Beginnen wir mit dem Entwurf des Roboters für unser Projekt.

Zuerst schneiden wir die Rückseite der Schachtel ab. Wir schneiden die farbigen Kartons zu und bedecken die 1. Schachtel mit Silikon.
Dann schneiden wir die farbigen Kartons noch einmal zu und bedecken die 2. Schachtel mit Silikon.

Wir silikonieren 3 Pappbecher, indem wir sie ineinander stellen. Anschließend bedecken wir die Außenseite mit farbigem Karton und Silikon. Wir führen den gleichen Vorgang noch einmal durch. Wir fertigen die Beine des Roboterdesigns.

Wir silikonieren die Füße, die wir unter der Box gemacht haben, deren Rückseite wir nicht aus den Boxen herausgeschnitten haben, die wir abgedeckt haben.

Wir silikonieren 3 Pappbecher, indem wir sie ineinander stellen. Dann silikonieren wir die Außenseite, sodass keine offene Stelle entsteht. Wir haben den Hals zum Teil des Roboters gemacht.

Wir silikonieren den Halsteil der Box.

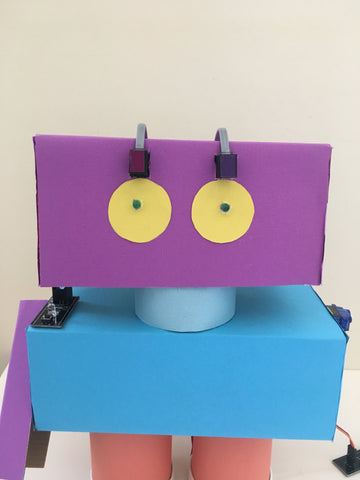
Wir schneiden 2 kleine Kreise aus farbigem Karton.

Wir silikonieren die Kreise auf der Vorderseite der Schachtel, aus der wir die Rückseite ausschneiden.

Mit einem Universalmesser öffnen wir Löcher, damit die LED-Module hineinpassen.

Wir platzieren 2 LED-Module in den von uns gebohrten Löchern.
Damit haben wir das Gesicht des Roboters fertiggestellt.

Wir silikonieren den Gesichtsteil des Roboters an den Halsteil.

- Aus den restlichen Stücken schneiden wir von der Rückseite der Schachtel rechteckige Stücke ab und bedecken sie mit farbigem Karton und Silikon. Wir falten es von beiden Kanten gleichmäßig.

Wir biegen es von den gefalteten Punkten aus gut. So erhalten wir die Arme des Roboters.

Wir silikonieren einen Arm auf der linken Seite des Roboterkörpers.

Anstelle des anderen Arms silikonieren wir zunächst den Servomotor horizontal ein. Wir werden die Spitze später silikonieren.

Wir silikonieren das Tastenmodul auf den Körper des Roboters.
Wir befestigen die Anschlusskabel der LED-Module. Wir silikonieren es, damit es glatt bleibt.

Wir befestigen die Verbindungskabel des Servomotors und des Tastenmoduls.

Wir befestigen den Servomotor an Tür 1, das Tastenmodul an Tür 2 und die LED-Module an Tür 3 und 4.

Wir verbinden das USB-Verbindungskabel mit der Pinoo-Steuerkarte und dem Computer. Jetzt können wir mit dem Codieren beginnen.
- Pinoo-Erweiterung hinzufügen:

Auf der Registerkarte „Erweiterungen“ klicken wir auf „Erweiterungen verwalten“.

Im sich öffnenden Fenster geben wir „Pinoo“ in die Suchmaschine ein und klicken beim Ergebnis einfach auf „Herunterladen“.
Es wurde auf unserem Computer installiert.
- Anschließen der Pinoo-Steuerkarte an den Computer:

In Mblock 3 klicken wir oben links auf die Registerkarte „Verbinden“. Wir klicken im sich öffnenden Fenster auf den Abschnitt „Serieller Port“ und wählen auf der sich öffnenden Seite die Option „COM6“ aus.
HINWEIS: Da die Porteinträge jedes Computers unterschiedlich sind, können die Zahlen neben dem COM-Text variieren.

Wir klicken auf die Registerkarte Karten. Im sich öffnenden Fenster wählen wir die Kartenoption „Arduino Nano“ aus, die von der Pinoo-Steuerkarte verwendet wird.

Wir klicken auf die Registerkarte Erweiterungen. Im sich öffnenden Fenster wählen wir „Pinoo“ aus, die Erweiterung der von uns verwendeten Steuerkarte.

Wir klicken auf die Registerkarte „Verbinden“. Im sich öffnenden Fenster klicken wir auf „Firmware-Update“.
- Codierungsteil:

Wenn wir zunächst auf die grüne Flagge klicken, stellen wir den Winkel des Servomotors auf 90 Grad ein.

Wir installieren den Endteil des Servomotors horizontal.

Parallel zum anderen Arm kleben wir diesen Arm an das Ende des Servomotors.

Wenn alle Teile platziert sind, wird es wie auf dem Bild aussehen.

Wir löschen die anderen Codes und platzieren den Codeblock wiederholt unter dem Codeblock des Pinoo-Programms.

Wenn nicht, fügen wir die Bedingungsstruktur hinzu und erstellen unsere Bedingung. Unsere Bedingung ist 2. Der Wert des an der Tür installierten Tastenmoduls muss gleich 1 sein. Wenn es gleich 1 ist, wird es gedruckt.

Wenn unsere Bedingung wahr ist, setzen wir den Status der an den Türen 3 und 4 installierten LED-Module auf niedrig.

Nachdem wir die LEDs ausgeschaltet haben, fügen wir den Codeblock dreimal erneut hinzu. Wir ändern in Abständen die Winkel des Servomotors. Auf diese Weise wird er winken.

Wenn der Zustand nicht korrekt ist, setzen wir den Status der LED-Module auf High und passen den Winkel des Servomotors an.

Wir klicken mit der rechten Maustaste auf den Befehl „Pinoo Program“ und wählen im sich öffnenden Fenster die Option „In Arduino installieren“.

Auf der sich öffnenden Seite klicken wir auf die Schaltfläche „Auf Arduino hochladen“.

Unsere Codes werden auf unsere Pinoo-Kontrollkarte hochgeladen.

Nachdem die Meldung „Upload abgeschlossen“ erscheint, klicken wir auf die Schaltfläche „Schließen“.
- Arbeitsstatus des Projekts:

Wir installieren die 9V-Batterie.


Wenn die Taste nicht gedrückt wird, leuchten die LEDs auf. Wenn die Taste gedrückt wird, erlöschen die LEDs und der Servomotor startet und winkt.